


Digital Twins of Transportation Systems: the Turing Test, the Boundary, and the Future

"This above all: to thine own self be true, And it must follow, as the night the day, Thou canst not then be false to any man."
Hamlet, Shakespeare
Between the philosophical musings of Zhuangzi's butterfly dream and the technological inquiry posed by the Turing Test, there is a timeless question: how can we tell that is real?
This article brings that question into the world of transportation. It explores potential pathways, through which transportation digital twins might blur the boundary of the real world. Three qualities define this possibility— interface indistinguishability, functional fidelity, and temporal flexibility.
With these in mind, the article draws a clear line between transportation digital twins and traditional microscopic traffic simulations. It argues that simulations enable, but do not define, digital twins. Finally, the article looks ahead to how digital twins could shape the future of intelligent transportations systems.
Rethinking the Turing Test
When Alan Turing introduced his eponymous test in 1950, the idea was simple: if a machine could carry on a conversation indistinguishable from that of a human, then it could be said to "think." Turing’s brilliance lay not in how he defined intelligence, but how he sidestepped the definition entirely—focusing instead on behavioral equivalence.
Whereas the Turing Test frames intelligence through the lens of "behavioral equivalence," Zhuangzi, centuries earlier, philosophically challenged the foundations of human cognition:
"Am I Zhuang Zhou dreaming I am a butterfly, or a butterfly dreaming I am Zhuang Zhou?"
This philosophical inquiry offers profound inspiration for the concept of digital twins: when a digital system can sense vehicle arrivals, respond to detector calls, coordinate signal phases, and interact with virtual hardware—all within a virtual environment—its behavior transcends appearances, rendering a "proof of existence through behavior."
A very real question emerges: How can we tell the “realness” of a transportation system’s digital twin?

Turing Test for Transportation Digital Twins
Zhuangzi questioned the cognition of "reality" and "existence" philosophically, while Turing offered a practical metric—behavioral equivalence.
To evaluate whether a digital system has genuinely crossed the behavioral boundary into “reality,” clear criteria must be established—not abstract notions, but testable engineering principles. Collectively, they distinguish a traditional model from a true digital twin—one that behaves, interfaces, and evolves as its physical counterpart would.
The boundary is defined by three essential qualities: interface indistinguishability, functional fidelity, and temporal flexibility. Satisfied, the digital system is no longer a model of the physical world—it becomes an operational extension of it.
Taking the example of a digital twin for traffic signal control systems:
Interface Indistinguishability
The traffic signal control system digital twin need to expose the same interfaces as the real-world system. For example:
NTCIP 1202 objects and behaviors: phase control, coordination, detector calls, preemption logic, all the management, operational, and configuration elements etc.
SDLC/HDLC-based serial bus interfaces for ATC cabinets (e.g., communications with load switches, detectors, pedestrian pushbuttons) - the boundary between hardware and software is so blended that there is NO functional difference between hardware defined device or software defined device.
Optional controller APIs or vendor-specific extensions.
Any system—central traffic management software, hardware-in-the-loop (HIL) testbeds, cabinet I/O testers, BIM, anything, everything—should be able to interact with the digital twin exactly as it would with a physical one. Everyone believes everyone else in the loop is real, authentic, and prepared. If they can't tell the difference, the first part of the test is passed.
"If it walks like a duck and quacks like a duck—it’s a duck."
Functional Fidelity and Temporal Flexibility
A digital twin is not about looking like reality—it is about behaving like it.
It should replicate the same logic as its real-world counterpart. This includes signal phase timing, clearance intervals, coordination, actuated behaviors, and conflict resolution with different traffic demand, network topology, and higher level control context.
It should respond to real-world inputs—such as detector calls—using the same logic as the actual system.
Crucially, it should support temporal flexibility. A digital twin should support multiple time domains:
Run in real-time for live system emulation or system-in-the-loop (SIL) applications, allowing it to run in parallel with the physical system as a concurrent mirror.
Run faster-than-real-time for scenario replay, accelerated testing, predictive analytics, or AI model training.
Simulation != Digital Twins!
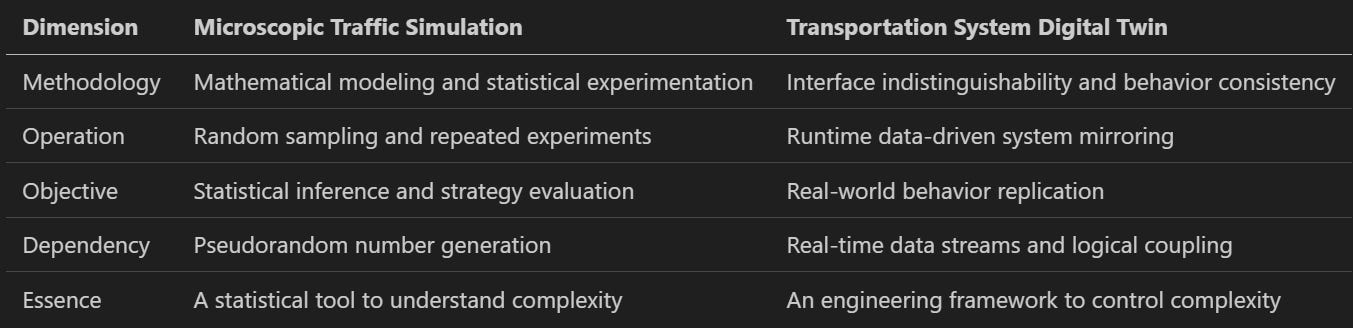
It is critical to understand - traffic simulation and transportation system digital twins differ fundamentally in methodology, purpose, and engineering design.
Microscopic traffic simulation relies on mathematical modeling and the statistical design of experiment. It uses a combination of models and probabilistic mechanisms to simulate traffic flow, signal control, and vehicle behavior.
To capture the uncertainty and variability of real traffic systems, simulations introduce pseudo-randomness— running multiple independent replications by varying random seeds. Analyzing results across replications, researchers can estimate statistical trends and confidence intervals of the conclusions. (Check this article for more insights)
Microscopic simulation studies transportation system through statistical inference. It allows us to design chaos and reproduce order.
Digital twins, by contrast, do not depend on randomness or repeated trials. They aim to replicate the real world directly and continuously. Instead of statistical inference, digital twins mirror the actual state, logic, and interactions of physical systems.
Thus, although simulations and digital twins may bear some similarities, they are fundamentally different:
Simulation models possibilities and uses experiments to infer system behavior.
Digital twins mirror actual behavior during run time, creating a live system surrogate.
In essence, simulation is a tool for understanding complexity, while digital twins are a framework for controlling it.
Simulation Empowers Digital Twins
Here’s the key insight: for the digital twin to function as a credible replica of traffic signal control system, it must be immersed in a digital environment that mirrors the physical world’s stream of events. That’s where traffic simulation enters the picture.
Simulation engines—such as TransModeler, discretize space and time to model traffic flow, vehicle arrivals, pedestrian movements, and signal events. This creates a statistically grounded digital foundation.
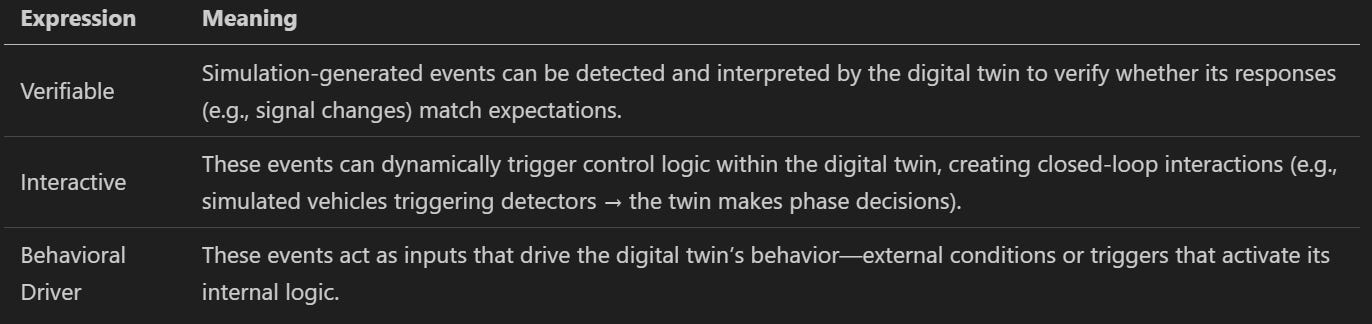
As the simulation unfolds, it generates a steady stream of events—vehicle movements, signal state changes, and detector activations—that reflect both the complexity and variability of traffic systems. More importantly, these events provide the digital twin with a verifiable, interactive, and behaviorally driven input source.
The simulated world becomes the source of real-time events (e.g., vehicle arrivals, detector actuations).
The digital twin responds as the real world would, generating signal states, coordination decisions, and even I/O commands from virtual hardware.
The simulation responds back to the control system’s decisions by advancing vehicle movements and recalculating signal impacts, in real time, or faster than real time.
Under a coupled simulation–digital twin architecture, the simulation acts as a data generator, continuously producing real-time or accelerated event streams. The digital twin, in turn, responds to and processes these inputs, forming a closed operational loop.
To external observers, the digital twin appears highly responsive and operationally indistinguishable from a real system.
To the twin itself, it is interacting with a world that behaves exactly like the physical one—with vehicle actions and detector feedback indistinguishable from reality.
This symmetrical feedback loop enables every system component to behave as if it were engaging with its real-world counterpart—allowing the digital environment to functionally substitute for physical infrastructure.
Anticipating the Future: When Simulation Outpaces Reality
When a simulation runs faster than the real-world—entering a state where "simulation outpaces reality"—the digital twin effectively gains a remarkable capability: it can anticipate the future.
This shift transforms traffic management from passive reactive to proactive intervention. It enables ahead of time (AOT) traffic optimization, response scheduling, and risk mitigation, combining both hindsight and foresight.
Each different random seed and strategy variation generates a new stream of events—a parallel timeline. These timelines represent possible futures, each a branch in a dynamic, unfolding system. This becomes a structured form of uncertainty—a controlled space in which futures can be forecasted, tested, and analyzed to inform decisions grounded in statistical significance, not speculation.
By engaging with these alternate scenarios, the digital twin can intervene real-world, steering the evolution of future outcomes and influencing decision pathways—ultimately determining the fate of Schrödinger’s cat within the "box of futures."
Beyond Digital Twins
If a central traffic management system can control a corridor using digital twin controllers without noticing they aren’t physical hardware—and if those digital twins can interact with a simulated world in real or accelerated time—then we’re no longer just simulating as the conventional Monte Carlo experiment or a path out of a stochastic process. We’re mirroring reality, and looking ahead of it.
That, in essence, is the Turing Test for digital twins of traffic signal control systems. But this is more than a philosophical benchmark. It presents a practical validation method for ensuring these technologies are ready for deployment, testing, optimization, and AI-driven training at scale.
When simulation and digital twins work in tandem, they unlock vast possibilities for the evolution of intelligent transportation systems.
Are we ready?
👉 👉 This article has a Chinese Version.