
交通系统数字孪生:图灵测试的边界

“首先,对你自己真实,那么如同昼夜交替,你也无法对他人虚伪。”
—— 莎士比亚,《哈姆雷特》
“怎得身似庄周,梦中蝴蝶,花底人间世。”
—— 辛弃疾《念奴娇·和赵国兴知录韵》
"真实为何物?",在数字时代获得了新的诠释维度。当辛弃疾写下"怎得身似庄周,梦中蝴蝶"时,或许未曾预见,数百年后的工程实践者正构筑起一个能够以假乱真的数字镜像世界。
在“庄周梦蝶”的哲思与“图灵测试”的技术设问之间,本文试图探讨交通数字孪生技术通往真实世界边界的潜在路径——接口不可区分、行为逻辑自洽、时间域的一致性。在此基础上,本文进一步分析微观交通仿真与交通系统数字孪生的本质区别,探讨仿真在孪生构建中的支撑角色,并展望未来数字孪生在智能交通决策体系中的发展方向。
重新思考图灵测试
艾伦·图灵在1950年提出了著名的“图灵测试”,以一种朴素而深刻的方式界定智能:若机器在对话中无法被区分于人类,则可视为具备思维能力。值得强调的是,图灵测试并未试图对“智能”进行本质性定义,而是巧妙地转向了以行为等价性为基础的外部检验方法。
图灵测试以“行为不可区分”作为智能的界定,而庄子则在《齐物论》中从哲学层面挑战了人类对现实认知的根基:“不知周之梦为胡蝶与?胡蝶之梦为周与?”这一哲学命题对于数字孪生具有深刻的启发意义——当一个数字系统在虚拟环境中感知车辆到达、响应检测器调用、协调信号相位,乃至与虚拟硬件交互时,其所展现的超越表象的行为真实,已然接近于一种“存在的行为证明”。哲学上我们或许无法给出唯一答案,但在工程应用中,必须面对一个更实际的问题:如何评判一个交通系统数字孪生的真实性?

面向交通数字孪生的图灵测试
庄子提出的是对“现实”与“存在”认知方式的哲学思辨,而图灵则提供了一把可操作的标尺——行为不可区分性。在工程领域中,这一思想为构建数字孪生系统的真实性判准提供了启示。
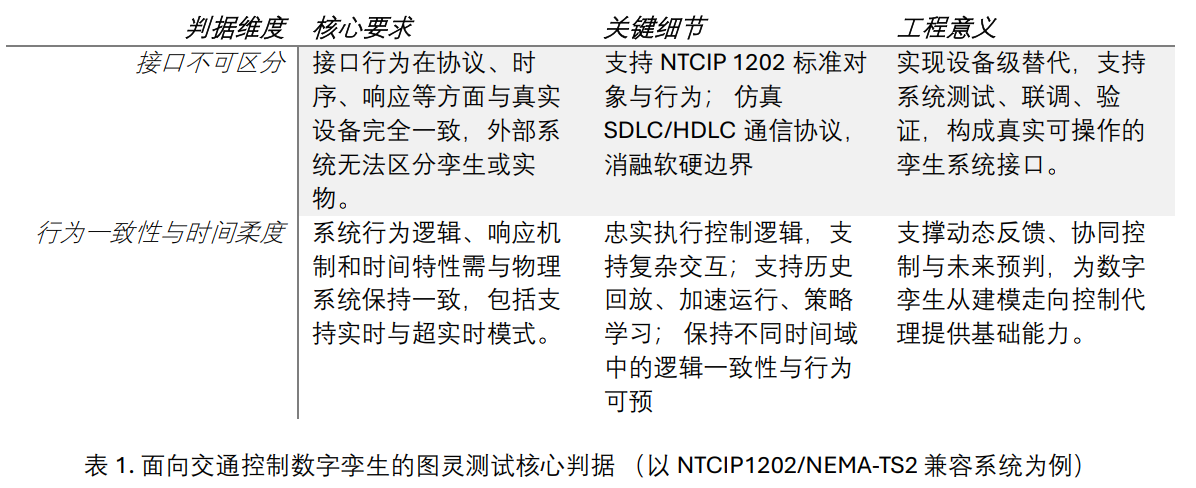
为进一步讨论的清晰性,本文以基于 NTCIP/NEMA-TS 标准的交通信号控制系统的数字孪生的实现为例。若要通过交通领域的“图灵测试”,它至少应满足以下两个核心标准:
接口不可区分(Interface Indistinguishability)
一个高可信度的数字孪生系统,应当提供与真实控制设备在接口层面完全一致的表现。这不仅要求协议层的仿真,更强调在行为逻辑、时序响应、接口完整性等方面的全维度一致性。具体包括:
标准协议与对象支持:涵盖 NTCIP 1202 所定义的各类信号控制对象与操作行为,包括信号相位控制、协调与优先机制、检测器感应逻辑、配置管理等关键模块。
硬件通信协议仿真:模拟基于 SDLC/HDLC 串口总线协议的物理通信机制,确保能够与机 柜中的各类设备(如Load Switch、检测器、SIU, BIU等)进行无缝交互。“软硬边界”的消融在此尤为关键——只有当软件定义的虚拟设备可以与物理设备互换使用时,接口的“不可区分性”才真正成立。
厂商扩展能力兼容:可选支持各厂商控制器的专有 API 或 OEM 协议,确保其在真实部署环境中的互操作性。
无论是在交通管理中心系统中调用,还是在硬件在环(HIL)平台、I/O 测试器或 BIM 工具中测试,一个合格的数字孪生系统都应如实呈现为“物理实体”般存在,令外部系统无法识别其为虚拟构件。正如那句流行的工程俚语所言:“如果它走路像鸭子,叫声也像鸭子——那它就是鸭子。” 如果数字孪生的接口行为与实际设备一致并无法区分,它就应被视为具有现实“资格”的组成部分。通过这一标准,数字孪生系统的第一道真实性门槛即得以确立。
行为一致性与时间柔性(Functional Fidelity & Temporal Flexibility)
交通系统中的数字孪生应在行为逻辑、功能响应和时序反馈等维度深度一致。这种一致性不仅是工程可实施性的保障,也是将“图灵测试”在数字孪生系统中具象化、可操作化的前提。
在行为层面,数字孪生系统应在逻辑结构与动态反应上做到与物理系统无差别对应。这意味着系统不仅需忠实复现交通信号控制器的完整运行逻辑,还应具备处理复杂交互场景的能力,能够实时感知、快速响应,并支持行为的自我演化。。
更进一步,一个数字孪生系统还应具备跨时间域的运行能力。在实时模式下,系统可与交通管理平台联动运行,与现实系统同步响应;而在超实时模式下,系统能够支持历史场景的回溯重构、运行过程的加速调优,或为基于人工智能的控制策略提供数据支撑与训练环境。无论系统运行处于哪一时间尺度,其内部逻辑都应保持一致,行为应具备可预测性。这种跨时域的行为对齐能力,是数字孪生获得工程级可信度的必要(尽管非充分)条件。
只有当数字孪生在接口层面实现“不可区分性”、在行为层面实现“功能一致性”,才能建立与物理世界之间的深度耦合,从形式模拟走向功能代理。
交通仿真与交通系统数字孪生的区别
在理解数字孪生之前,我们首先要明确它与传统的交通仿真之间的差异。
尽管微观交通仿真和交通系统的数字孪生,在形式上都以虚拟方式复现现实交通过程,但二者在方法论、目的性与工程机制方面存在本质差异。
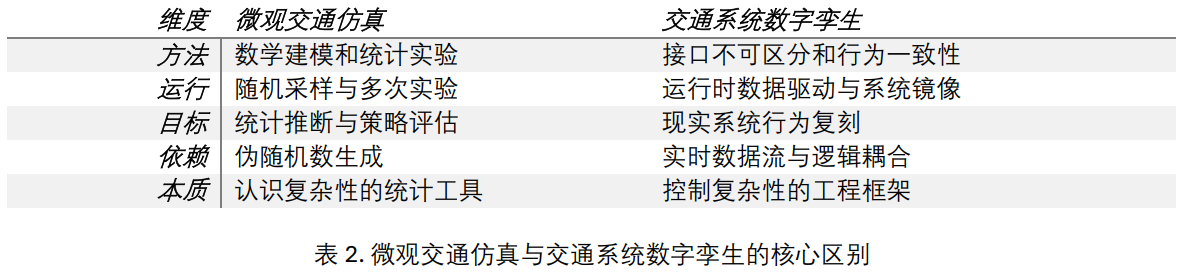
微观交通仿真是一种依赖数学建模与统计实验的技术路径,其核心通过一系列的数学模型和概率机制来模拟交通流、信号控制与车辆行为的演化过程。为了刻画现实交通系统中普遍存在的异质性与不确定性,仿真系统通常引入伪随机数生成机制, 来“模拟”系统内在的随机性。这一过程通常通过设定不同的随机种子,生成交通系统随机过程的多个独立实现(replications),以对样本空间进行有效采样。随后,基于重复实验的观测结果,构建实验输出的统计置信区间,从而刻画系统在不确定性条件下的行为特性。这意味着,微观仿真以“重复实验”为基本单位,通过构建“统计逼近”来认识复杂系统行为。 研究者通过多轮实验结果的平均值、方差及其他统计量,提炼交通系统的统计趋势。微观仿真所依赖的伪随机性,既是对现实世界复杂性的数学简化,也是对工程实验控制与行为重现之间权衡的技术选择。它让我们既能“设计混沌”,也能“复现秩序”。

相比之下,数字孪生则并不依赖于随机性和实验设计,它不以“实验”或“采样”为基本单位,而是致力于实时或准实时地复制现实世界的状态和行为, 也就是在虚拟环境中精确地模实际系统的运行逻辑。数字孪生的目标是实现高度保真的行为一致性——不依赖随机抽样或重复试验,而是通过与真实系统在数据、逻辑、反馈与交互等层面的紧耦合,构建一个具有持续性与确定性的系统镜像。
因此,尽管交通仿真与数字孪生在工具层面可能共享某些基础工具(例如交通建模软件),但其逻辑基础与工程定位方面存在根本差异:前者依赖于数学模型,强调仿真实验设计与统计推断,后者则依赖于运行时数据驱动与系统镜像,强调对实际系统状态的映射复制与行为交互。前者关注的是系统的“可能性空间”,而后者追求的是对现实系统的“即时复制”。
这种差异决定了交通系统数字孪生不能被视为交通仿真的“升级”。它更接近于一种运行时系统,一个能够与现实交通系统进行同步通信和动态响应的数字代理。本质上,交通仿真是认知复杂性的统计工具,而数字孪生则是用于控制复杂性的工程框架。表2总结了微观交通仿真与交通系统数字孪生核心区别。
仿真为数字孪生赋能
交通仿真虽然不能等同于作为交通系统数字孪生,但在后者构建中扮演着至关重要的支撑角色。
交通仿真引擎(例如TransModeler)通过对空间和时间的离散化(空间连续-时间离散或空间离散-时间离散),模拟交通流、车辆到达、行人行为以及信号事件的发生,形成了一个具有统计意义的“数字基底”。在仿真系统运行过程中,事件流——包括车辆流动、信号状态变化、检测器响应等——不仅体现了交通系统的复杂性与不可预测性,同时也为数字孪生系统提供了可验证、可交互的行为驱动基础。表3总结了微观交通仿真为交通系统数字孪生赋能的关键元素。
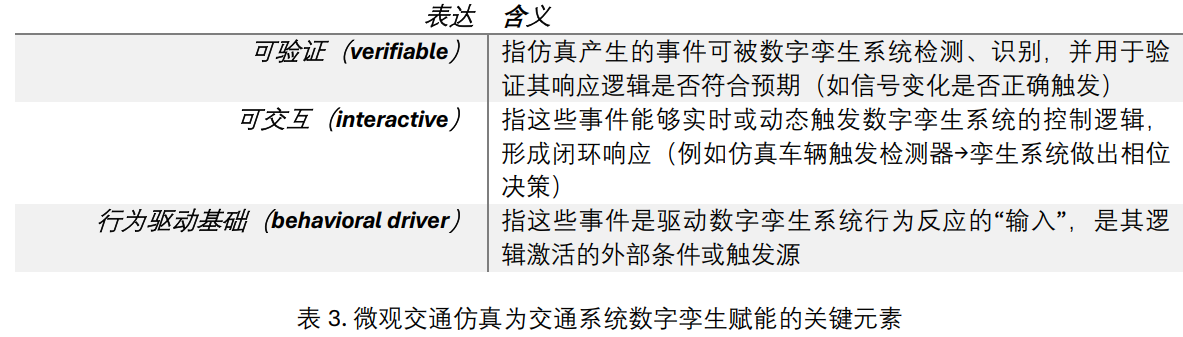
在仿真与数字孪生深度耦合的架构下,交通仿真系统成为数字孪生系统的“数据发生器”,持续输出实时或超实时的事件流。数字孪生系统则响应并反馈这些输入。二者形成了一个运行闭环(coupled simulation-twinning loop)。对于外部观察者,数字孪生呈现高度的响应一致性与操作透明性;而对数字孪生而言,其“感知”到的是一个包含真实车辆行为与检测器响应的物理世界。这种对称性的交互结构,使得系统中的每一组件都“相信”自己正在与真实对象发生交互,从而实现了数字系统对物理世界的结构性替代。
当仿真系统的运行时间领先于现实系统——即系统进入“模拟快于现实”的状态时,数字孪生系统便获得了“预知未来”的能力,使交通优化、响应调度与风险规避从被动响应转变为主动干预。交通仿真的每一个随机种子和不同策略所展开的事件流,对应着一个平行未来分支的探索。 这是一种可控的不确定性。通过与不同平行世界的交互,数字孪生系统能够在决策链中实时干预未来路径的演化方向,影响“未来之箱”中薛定谔之猫的生死抉择。
迈向数字孪生的未来
随着交通系统朝着更高复杂性与智能化演进,衡量数字孪生能力的标准也在发生转变:从整合建模与仿真的技术能力,跃迁至实时感知、协同决策与动态演化的系统能力;从静态再现的可视化工具,转向主动适应与未来预判的现实代理系统。
这是一种根植于数字世界的原生能力,一种面向未来的智能交通架构。仿真+数字孪生,让交通系统的未来充满无限可能。