


The Forgotten Bits of NEMA-TS2 High-Precision Timestamps

"Do I dare disturb the universe?" - T.S. Eliot, "The Love Song of J. Alfred Prufrock"

The NEMA-TS2 controller introduced an ingenious mechanism capable of providing high-definition timestamps for detector calls and actuations with a remarkable 1-millisecond resolution.
Employing 16 bits within the Type 148 - 151 Response Frames, this feature, though stipulated by the standard, regrettably remains largely untapped, as vendors, controllers, and detection devices have yet to harness its potential.
Instead, the industry persists in adhering to the basic and rudimentary 100-millisecond update intervals.
This article delves into the narrative of these forgotten bits, lost in history, yet retaining a hidden gem of untapped capability.
Background
Detectors play a pivotal role in modern traffic signal control systems by sensing the presence, passage, speed, and classification of vehicles, bicycles, or pedestrians at specific locations on roadways. Their significance is particularly pronounced in actuated signal control, a dynamic system that adjusts signal timing based on real-time traffic demand.
The following figure shows a conventional loop detection system. In this figure, the electromagnetic field of the inductive loop detectors will be disrupted when a vehicle passes over the loop, indicating the presence of a vehicle.
The detector reports an actuation ON state to actuated signal controller when a vehicle is detected and an OFF state otherwise.
The actuation ON state can be interpreted differently. If the associated phase is not currently active, the actuation ON state signifies an active call for right-of-way, indicating a demand for the associated traffic movement to be served. On the other hand, if the phase is already active, the actuation ON state can extend the green time of that phase to accommodate the detected vehicle's passage.

The terms "sensor" and "detector" are often used interchangeably and encompass various detection technologies, including inductive loops, video, thermal imaging, or microwave-based systems.
In actuated control, they all serve the purpose of reporting vehicle presence in terms of the actuation ON and OFF states sampled at fixed interval of 100 milliseconds. By analyzing actuation ON/OFF information, the actuated control system can make informed decisions regarding dynamically starting, extending, or terminating phase green intervals, ensuring efficient and responsive signal timing.
NEMA TS 2 requires a standard 10 Hz sampling rate of detector state. Higher sampling rate may be used for higher precision. For instance, the traffic signal control system in operation within New York City utilizes a 30 Hz sampling rate. This system is implemented through a specialized Central Business District (CBD) version of a pole-mounted traffic cabinet, which, due to its small cabinet housing design, accommodates 6 load switches and 10 inputs, all managed by a single TF BIU for all inputs and outputs. In this non-standard setting, the system scans the inputs faster than 10 Hz to measure vehicle length and speed.
Revisiting the subject, it's important to note that NEMA-TS2 controllers, as well as ANY contemporary NTCIP-compliant ATC controllers descended from the NEMA-TS lineage, exhibit a heartbeat rate of 10 Hz. Consequently, with this sampling frequency, the timestamp precision for any recorded detector call or actuation event is limited to 100 milliseconds.
The Timestamp Design
But that is not the end of story.
Continuing the narrative, the NEMA-TS2 standard's early contributors devised an ingenious solution to achieve a remarkable 1-millisecond resolution for detector calls. In this innovative design, every Detector Bus Interface Unit (BIU) is equipped with an internal timestamp generator—a free-running 16-bit binary counter that initiates counting from 0 upon BIU power application, progressing up to 65535. Upon reaching this value, the counter seamlessly rolls over to 0 and resumes counting. Each increment represents a precise 1.0 millisecond, with an error margin of just +/- 0.05%.
Crucially, for each detector channel, there are two call bits and 16 timestamp bits, a total of 18 bits per channel working in tandem, collectively delivering a finely detailed resolution of 1 millisecond. This astute combination of bit manipulation underscores the initial vision of NEMA-TS2 designers to achieving superior accuracy in timestamping detector events for any imaginable applications at the time.

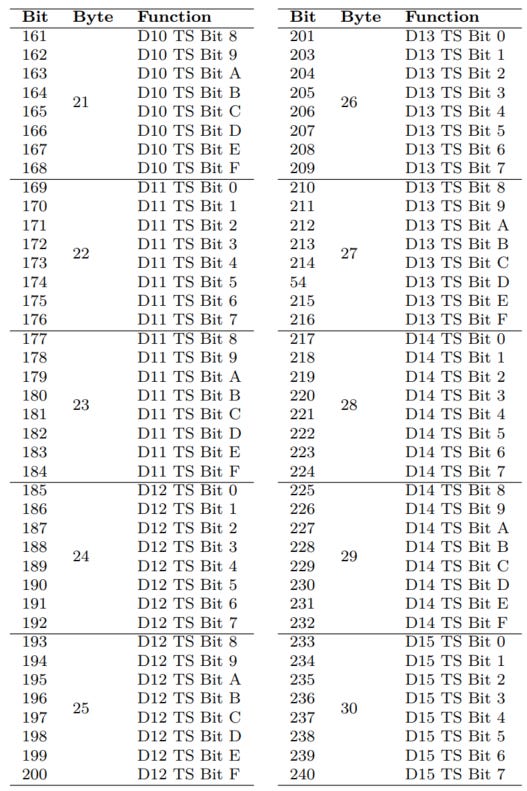
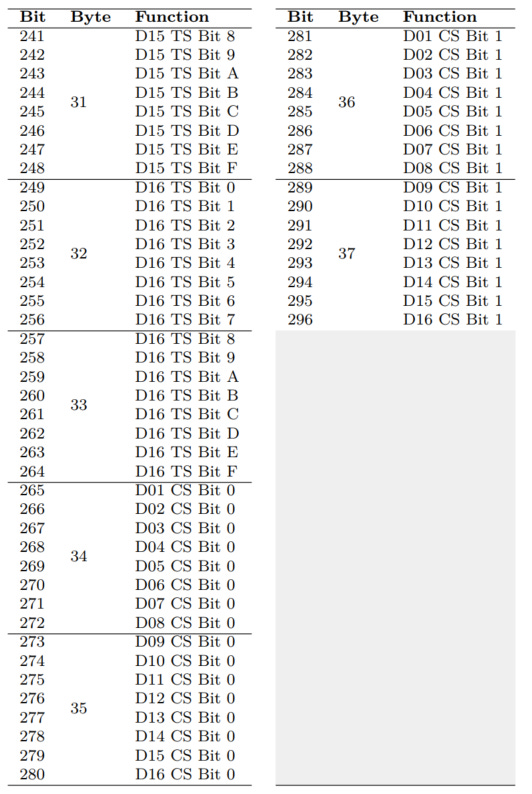
When the traffic controller polling detector status using Type 20 Command Frame, the BIU should respond Type 148 Response Frame, with a payload of 296 bits, defined below:

Lost, but not buried.
The NEMA-TS2 standard is theoretically designed to offer an efficient solution for addressing the need for 1ms high-resolution detector event timestamps. However, in practice and up to the present date, NEMA-TS2 controllers, modern NTCIP-compliant ATC controllers rooted in the NEMA-TS lineage, and various traffic detector BIUs consistently refrain from utilizing the 16-bit timestamp bits. Instead, they exclusively rely on call status bit 0 to convey detector call status (0/1) at fixed 100-millisecond intervals. Unfortunately, this operational approach leads to the actual loss of informative 17 out of 18 bits per channel, wasting 95% of the payload's valuable bandwidth.
The pragmatic decision to check only 1 out of the 18 bits for detector status is understandable, as ordinary intersection control applications at typical travel speeds may not demand 1ms precision. However, it underscores untapped potential.
In the context of Connected and Autonomous Vehicle Applications, this methodology holds promise for broader use, particularly when higher resolution becomes crucial. The inherent ingenuity of this solution can extend beyond its current application, resonating in scenarios that demand finer temporal precision.