
Be Water, Traffic Signals: the Art of Maximum Green

Empty your mind, be formless. Shapeless, like water. Be water, my friend.” - Bruce Lee
上善若水,至柔则刚。 - 《道德经》
Fully Actuated Traffic Signals are formless and shapeless in the traffic choreography. Akin to a skilled solo martial artist in the traffic arena, these signals dynamically extend and terminate phases on the fly not bound to any fixed cycle length. Resembling water that effortlessly conforms to the contours of its container, these signals mold themselves to the variations of traffic demand, embracing the art of responsiveness.

Be Water - the Gang of Three MAXes
The fully actuated traffic signal system dynamically adjusts the duration of signal phases in response to detector actuations. Successive vehicle arrivals trigger phase extensions, while the termination occurs either through the expiration of tight time headways or the exhaustion of a predetermined maximum green time.
“A” predetermined maximum green time - well, not exactly right.
By NTCIP 1202 v3 standard, each phase could have three maximum green times, designated as Phase Maximum 1, Phase Maximum 2, and Phase Maximum 3 parameters:
Phase Maximum Parameter in seconds (NEMA TS 2 range: 1-255 sec). This time setting shall determine the maximum length of time this phase may be held in Green in the presence of a serviceable conflicting call. In the absence of a serviceable conflicting call the Maximum Green timer shall be held reset unless Max Vehicle Recall is enabled for this phase.
Phase Maximum 1 Parameter is the default maximum value to use but can be overridden by Phase Maximum 2 or 3 via an external input coordMaximumMode or other methods.
This configuration of three Phase Maximum Parameters allows for dynamic adjustments in the duration of a phase during runtime, providing the flexibility for variation in up to three different magnitudes.
Be Shapeless - Dynamic Maxes
Having three Phase Maximum Parameters is not the end of story. “Dynamix Max Green” renders “shapeless” signal operations.
“Dynamic Max Green” is sometimes referred to as “Adaptive Splits”, or “Coordination Adaptive Splits (CAS)” in different context. The concept was first proposed with the early UTCS in the 1970s, implemented in 1993 as a local controller feature with the NEMA-TS1 framework, and NOW available with ALL NEMA-TS2 controllers. It is part of the NTCIP 1202 standard. But it is NEVER an official NEMA-TS1 or TS2 feature.
“Dynamic Max” is perhaps one of the under-utilized features of modern traffic signal controllers. It has several variants, with its origin tracing way back to the 1970s when the Urban Traffic Control System (UTCS) was initiated by the Federal Highway Administration (FHWA).
The concept is elegantly simple, that is, effectively manage the phase “slack time”. The aim is to prevent any phase from squandering unused green time, while concurrently avoiding situations where a phase is clamoring for additional time. When a phase experiences unused green time, often referred to as a "gap-out," the controller dynamically reallocates this surplus time to other phases that are either forced off or have reached their maximum duration. In essence, this approach provides a form of localized adaptive control, enhancing the overall efficiency of the underlying actuated operations.

Dynamic Max can be perceived as an ad-hoc bang-bang control mechanism, fine-tuning signal splits based on short-term demand fluctuations detected locally. Its inherent adaptability is underlined by an implicit feedback loop, and the control law derived from this concept is Lyapunov Stable.
Throughout its evolution, this concept has assumed different monikers from various controller vendors, such as Critical Intersection Control (CIC), Adaptive Splits, or Coordination Adaptive Splits (CAS). Notably, it has not found inclusion in the NEMA-TS1 or TS2 standards but has solidified as the "Dynamic Max" specification within the NTCIP 1202 standard.
When the traffic signal controller operates in coordinated-actuated mode, Dynamic Max effectively balances non-coordinated phases without impacting the coordinated ones. Consequently, cycle length and offset remain largely unaffected in most scenarios. Conversely, in fully actuated mode, green time balancing can occur across any phases, resulting in the "de facto" (or pseudo) cycle length fluctuating within the range defined by the minGreen and maxGreen parameters of all phases.
Caution is warranted: should a phase encounter a failed detector or be subject to maximum recall, the Dynamic Max feature ceases, and the phase reverts to the currently applicable maximum green time—be it MAX 1, MAX 2, or MAX 3.
One might ponder the distinction between Dynamic Max, operating during coordinated-actuated mode, and clever force-off settings. The key difference lies in the fact that force-off settings under coordinated operation do not inherently and immediately redirect the unused green time to the most crucial phase. This situation may result in the unused green time being allocated to a coordinated phase (referred to as early return to green), the subsequent non-coordinated phase, or a designated phase. Dynamic Max stands apart by promptly elevating the priority of the phase in need or diminishing an excessively supplied one in a direct manner.
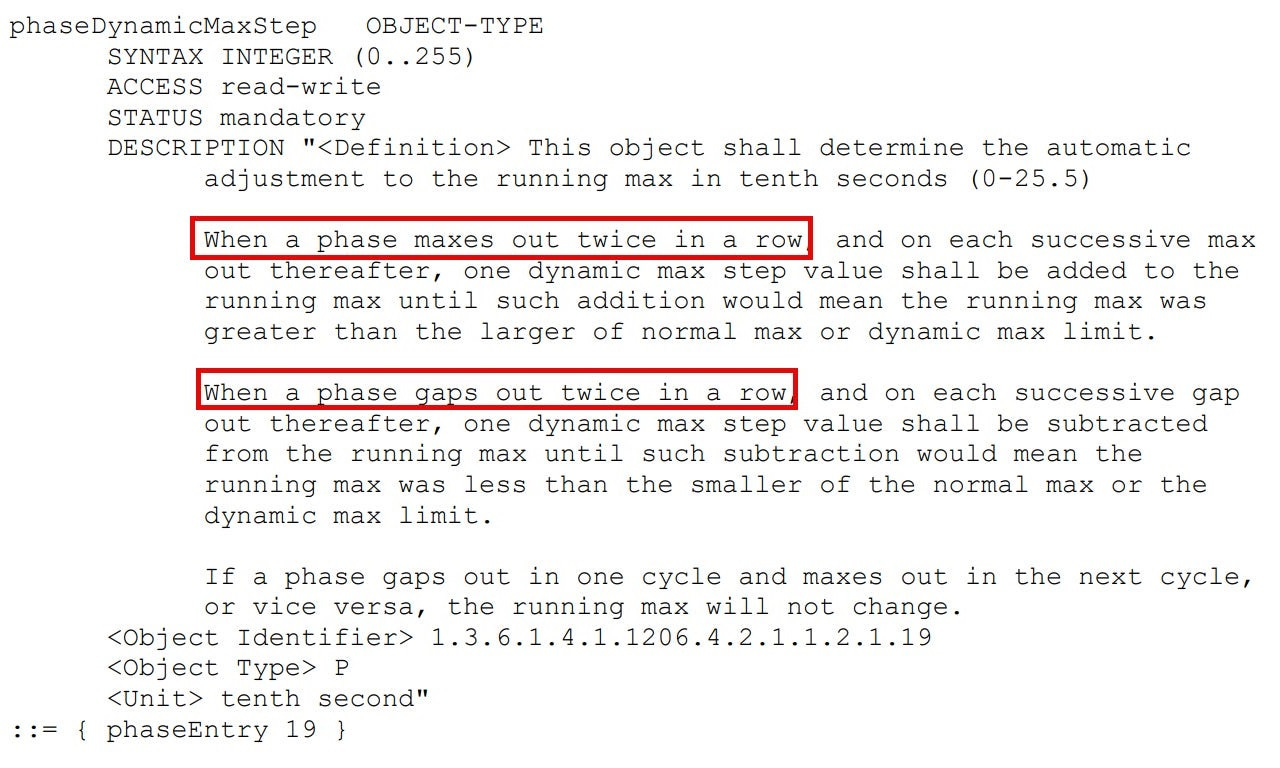
The activation criteria for Dynamic Max hinge on a phase maxing out or experiencing two consecutive gap-outs. This condition is universally adhered to by all NEMA-TS2 controllers, with the exception of one particular controller brand, which introduces its own variation by requiring three occurrences instead of two.
Regardless two or three occurrences, Dynamic Max functions to either decrease or extend the maximum green time, overlaying local actuated operations. Twice appears less conservative compared to the threefold requirement, especially in max-out scenarios. Waiting for three consecutive max-outs sometimes might be too delayed in responding to rapidly increasing traffic flow demand.
It's noteworthy that whether set at twice or thrice, this parameter is hardcoded in the controller firmware, offering users no customization options. Hopefully, anticipating future editions of the NTCIP 1202 standard, there might be room for improvement, potentially introducing a dedicated object for users to customize this aspect.
Be Formless - No Pattern’s Pattern

NTCIP 1202v3 provides a versatile framework encompassing a total of 243 coordination patterns. Each pattern is designed to align with a specific signal timing plan, catering to distinct traffic flow scenarios. These patterns may manifest temporally, reflecting varied time of day or seasonal traffic conditions, or they could be contingent upon specific events. Additionally, they can serve as integral components within a repository, functioning as a toolbox for advanced congestion management or Integrated Corridor Management strategies.
With the exception of Pattern 254 (Free) and Pattern 255 (Flashing), all other patterns within NTCIP 1202v3 are required to specify a cycle length and splits. These parameters are crucial as they define both the intersection's designed capacity and the distribution of that capacity across individual phases.

Upon scrutinizing the specification of the patternCycleTime object, an intriguing loophole comes to light. If, by some stroke of creativity, the cycle time of a pattern is set to zero while keeping the splits non-zero, the controller undergoes a delightful transformation. Instead of adhering to the conventional coordination plan, it graciously dons the role of a special Fully Actuated Signal Plan. In this whimsical scenario, offsets become mere decorative elements, and the signals elegantly embrace the split times as their Maximum Green Time.
This uncovers a crafty maneuver—a trick that allows the sly operator to revel in fully actuated control without being shackled by the imposing figures of MAX1, MAX2, or MAX3. It's a bit like having your cake and eating it too, traffic control style.
But wait, there's more! This peculiar configuration bestows upon us a structured non-pattern control. Picture this: up to 243 distinct sets of Maximum Green Times, each waiting eagerly to be activated by our very own logic, gracefully sidestepping the rigid constraints of the hard-coded Dynamic Max. Now, if that doesn't make you smile, traffic management just got a whole lot cooler.
This is really cool. I like to use patterns 2, 3, and 4 (inherited due to a flaw in ASC/2 pattern 1 found by a predecessor) as common AM, Mid, PM. Working in mid-size communities, this often works fine with no need for another plan other than free operations. However, I think I may like using this technique of zero cycle time instead and setting my max's (splits) in the coordination plans. In my current position, many of my signals are free. Even as I seek to add coordination to a corridor that logically should be coordinated based on it's function and volume, my observations suggest, it may not be of that much value. side street traffic is too rare and ped splits would overrun causing some disruption to the coord plan. I've found my Econolite ASC/3 Cobalt controllers to be very slow to recover. I'm really hoping that EOS has improved on that as I look to make that switch.
John Deskins
jdeskins@ci.richland.wa.us